



Everyone does it the first time they try VR. It doesn’t matter if it’s a static 360 image, a passive 360 video, an immersive VR experience, or a fast-paced VR game, everyone reaches out with their hands in an attempt to touch the virtual world. This happens a lot on the Samsung Gear VR with people that aren’t very tech savvy. Even though the headset lacks a front-facing camera and has zero hand-tracking and zero haptic feedback, it doesn’t matter. VR has finally advanced enough that it can be so immersive and so convincing that we want to reach out and touch it with our hands, but conventional wisdom says that just isn’t possible yet.
Until now. Meet the Contact CI haptic glove, Maestro.

CES 2018 is a massive event that overtakes virtually all of Las Vegas and its surrounding cities with multiple convention center show floors, thousands of booths, and hundreds of thousands of people descending on the desert to learn about and talk about the latest and most cutting-edge technologies on the planet. And amidst it all I’ve gotta say that this little glove, the Maestro, may be the most impressive thing I saw all week.
Now to be clear, when I say most impressive I don’t mean that it’s super polished, or finished, or that it’s going to change the world. But this thing does something that no other device has ever done in my experience by letting me actually feel the sensation of touching things that don’t exist in the real world. And I don’t just mean it’s a glove with finger tracking — we’ve seen tons of those before. No, Contact CI have created a glove that actually simulates the tension, pressure, and push back of solid surfaces and objects as if they physically existed.
Let me explain.
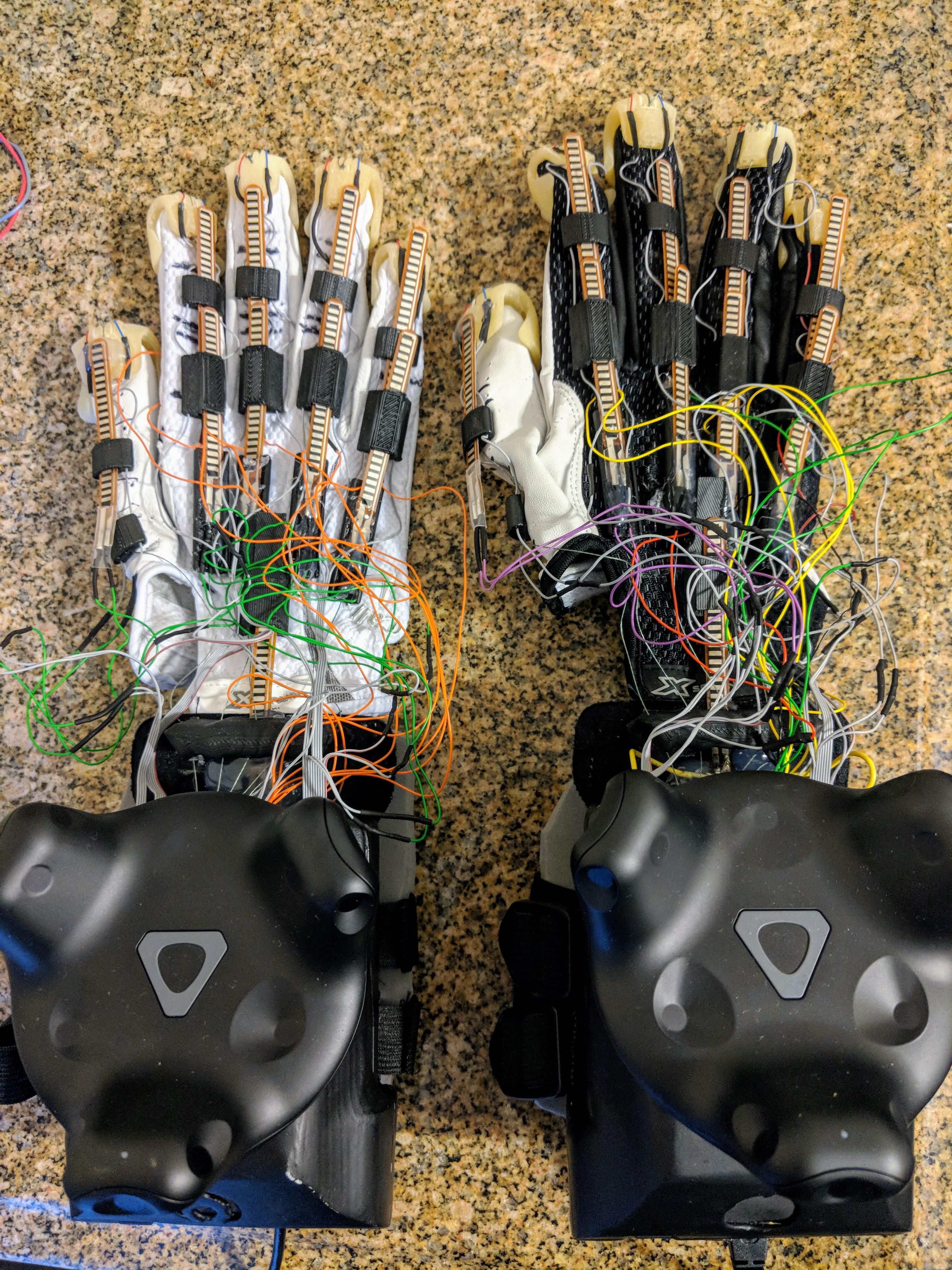
See all of those wires and tendrils on the glove? They’re all connected to that base box that’s strapped to my wrist in the images on this article and they extend out into the little thimble-shaped cups at the tips of each of my fingers. They look a bit like tendons, don’t they? That’s because they are.
The team at Contact CI basically recreated a small slice of human anatomy by fabricating electrical tendons connected to a motorized faux-muscle that retracts and pulls on your fingers just like your actual muscles.
So when I’m wearing the glove and I reach out to press a button in VR, instead of my digital hand passing through the interface entirely as if I’m some sort of spectral being or like the surface is translucent, I’d feel resistance. Once my digital finger collides with that virtual button, the motors and electric tendons in my glove pull back on my finger in the real world, telling it that it’s just collided with something that has mass, which causes me to subconsciously stop pushing forward. By employing a mixture of visual and physical cues that look and feel super, super close to the real thing, my mind is telling my finger, “You just pressed a button so stop pushing your hand forward,” and that’s exactly what happens.
It’s incredible.
Imagine playing a game like Star Trek: Bridge Crew using these gloves. Instead of accidentally phasing through the desk, innacurately jittering around the interface, or never being sure if you actually pressed a button or dial correctly, these gloves could completely change that. Each one of those buttons you press and switches you flick would result in believable, physical feedback.
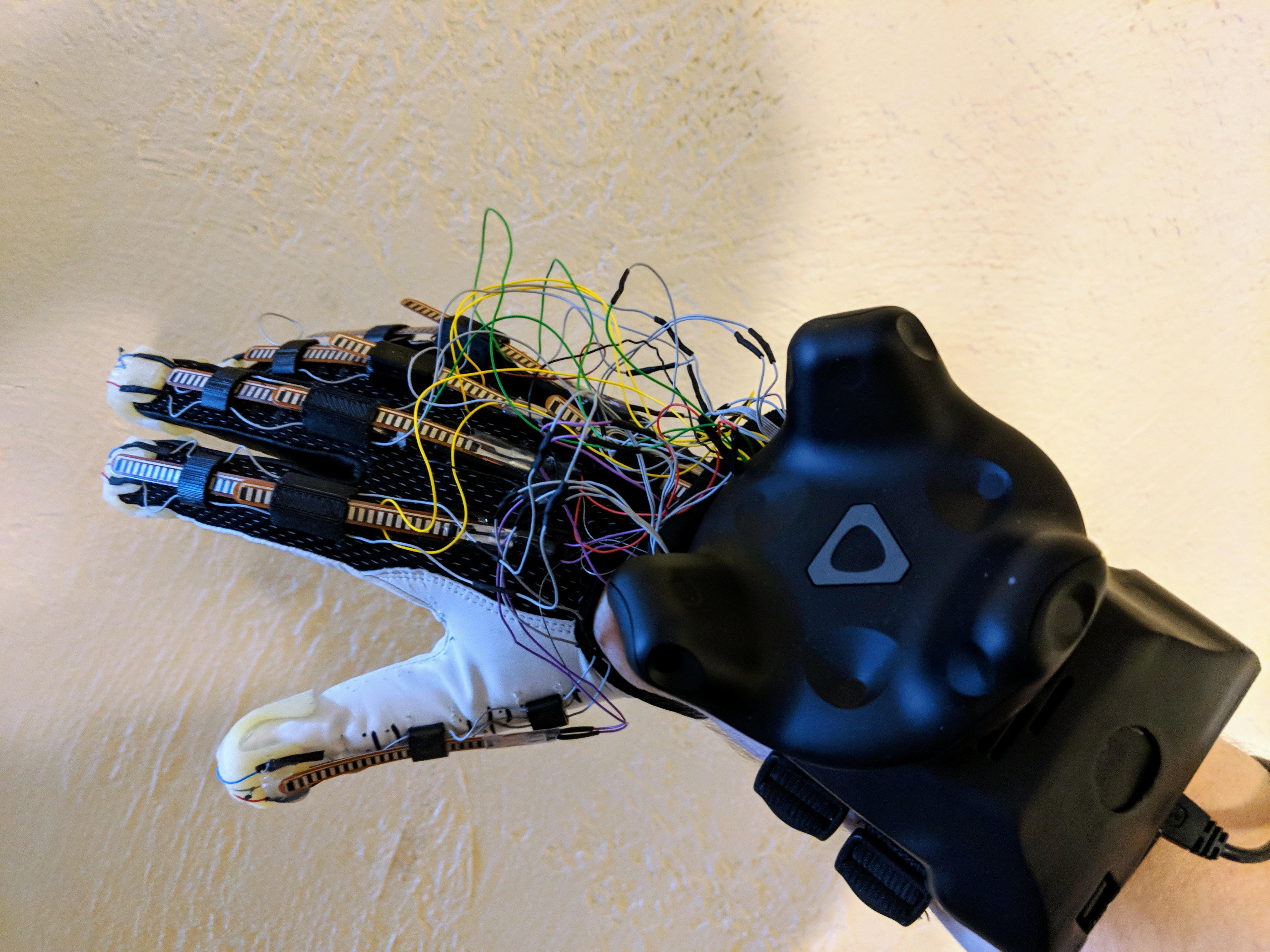
During my demo with the glove I tried out a brief VR experience using an HTC Vive with a Vive tracker attached to the back of the glove for positional tracking. I completed a series of calibration steps that had me twisting my hand and flexing my fingers before things got started and then I was off.
The demo consisted of a small table in front of me with a collection of balls, cylinders, and cubes. I reached out and first tried to grab a cylinder. At first my fingers bumped the edge of the table when I was reaching over and I felt the electronic tendons recoil my muscles backwards, causing me to flinch. I honestly thought I had hit something in the real world room I was standing in for a second before I realized what had happened.
Eventually I was able to curl my fingers around the cylinder, squeeze, and pick it up. There is no way to artificially simulate weight of course, but I could feel the pressure on the tips of my fingers as I held it. Once I opened my hand the pressure subsided and the cylinder fell to the table once again.
After that I flicked a ball with my index finger and watched it roll around. Using the palm-side of my hand I brushed my fingers lightly against the cubes and balls just to ever so slightly feel the pressure increase letting me know it was a solid object.
Remember how I said I had to calibrate the glove before the experience started? Well, as great as the haptic feedback was (and believe me — it really was something remarkable) the finger tracking was a different story. Picking up objects was often tough and inaccurate and it never really seemed like it could tell how I wanted to move and curl my fingers. Even older finger tracking systems like Manus did this bit better. However, that isn’t a huge deal to me — finger and hand tracking has been solved and just needs some cleaning up and polish. The fact that the only issue is something that minor is worth noting.

Contact CI is not interested in creating a consumer-grade product at this time since they’re such a small (currently less than 10 employees) company. Instead, they’re looking to partner with headset manufacturers and input system developers to work out the inclusion of their haptic and hand solutions into the next generation of VR input methods. From what I saw at CES this week the Maestro is clearly a little ways away from being ready for anything like that, but platform creators such as HTC and Facebook’s Oculus should certainly take note.
Let us know what you think about the glove and any questions you might have down in the comments below!




























