


One of the remaining barriers preventing virtual reality from tapping the maximum level of immersion comes down to player input. The various headsets transport us to fantastic worlds, but the illusion stumbles a bit when we have to get our hands dirty and grab hold of virtual items.
Reported on Motherboard, researcher Inrak Choi along with colleagues in the Shape Lab at Stanford created a prototype that could improve that type of input. Dubbed the “Wolverine”, the haptic feedback device will simulate realistic resistance when trying to grasp objects in virtual spaces.
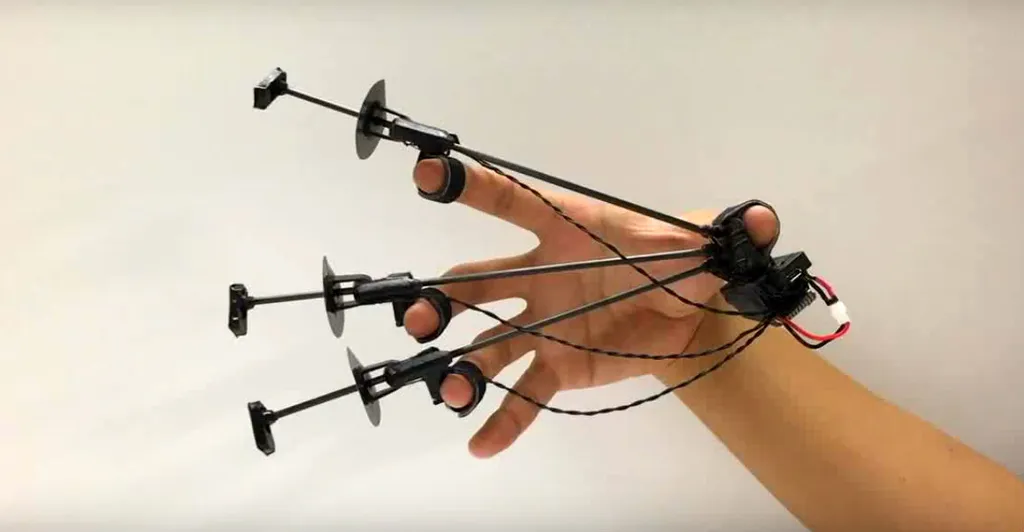
The Wolverine is attached to your hand at your thumb and extends to three rods attached to all but your pinky. As you squeeze, a low-power slide and brake system both provide resistance based on whatever the dimensions are of the item you’re grabbing in VR. Simply put, when you grab onto something it will feel like you’re actually holding on to it. The positioning of the three rods even allows for grasping items of different shapes, so this device has a versatile set of implementations. In addition, it is Bluetooth, lightweight, and low energy so it can be used for long periods of time with no wires to avoid while moving around.
There are currently many devices in development that are attempting to replicate haptic response in similar ways to the Wolverine, like Microsoft’s touch replicating devices and Dexmo’s haptic exoskeleton. Other than making us feel like the Marvel superhero, the Wolverine may not be the most visually appealing of the haptic devices but it certainly has a degree of practicality to its function. If it doesn’t become a regularly distributed accessory at some point, hopefully, it will inspire something similar. More information on the research team’s development and findings can be found here.




























